
| 尺寸 | 处理器型号 | 输入电压范围 | 输出电压范围 | 持续电流(CAN1/2) |
|---|---|---|---|---|
| 长140mm、宽82mm、高40mm | RK3588S | 24V-50V | 24V-50V | 30A |
| 持续电流(CAN3/4) | 持续电流(CAN5/6/7) | FDCAN波特率 | CAN/FDCAN通道数量 | 功能拓展接口 |
|---|---|---|---|---|
| 20A | 20A | 5Mbps | 7路 | GH_1.25_3p/4p/5p |
| IMU | 开发环境 | 语音接口拓展 | 4G模块拓展 |
|---|---|---|---|
| YIS130 | ROS1 | 支持 | 支持 |
• 型号
• 功能定位(简介)
• 长140mm、宽82mm、高40mm(带外壳)
• 长134.8mm、宽77.3mm、21.3mm(不带壳)
1. 输入电压范围:24V-50V
2. 输出电压范围:24V-50V
3. FDCAN波特率:5Mbps
4. 7路CAN/FDCAN通道
5. 功能拓展接口都为25_3p\4p\5p
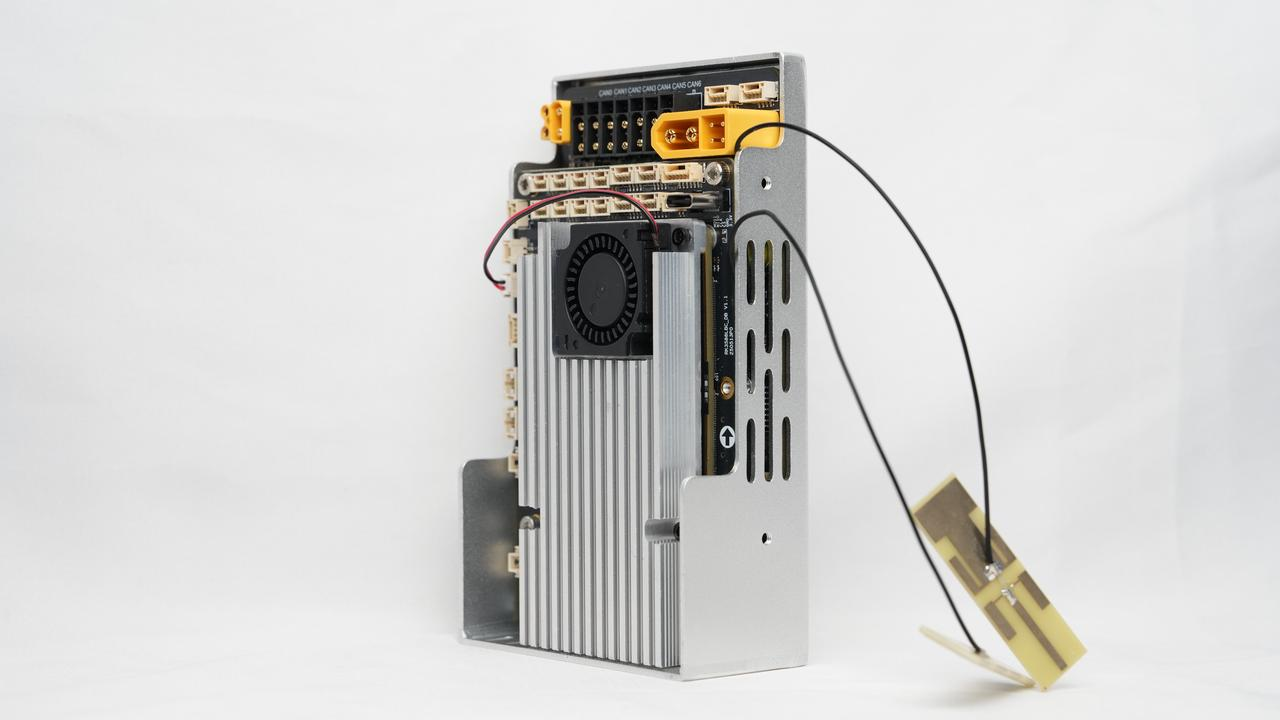
鲁班猫主控盒子由RK3588核心板,RK3588底板、功率板加IMU三部分组成
(1)机器人主控盒子-RK3588核心板
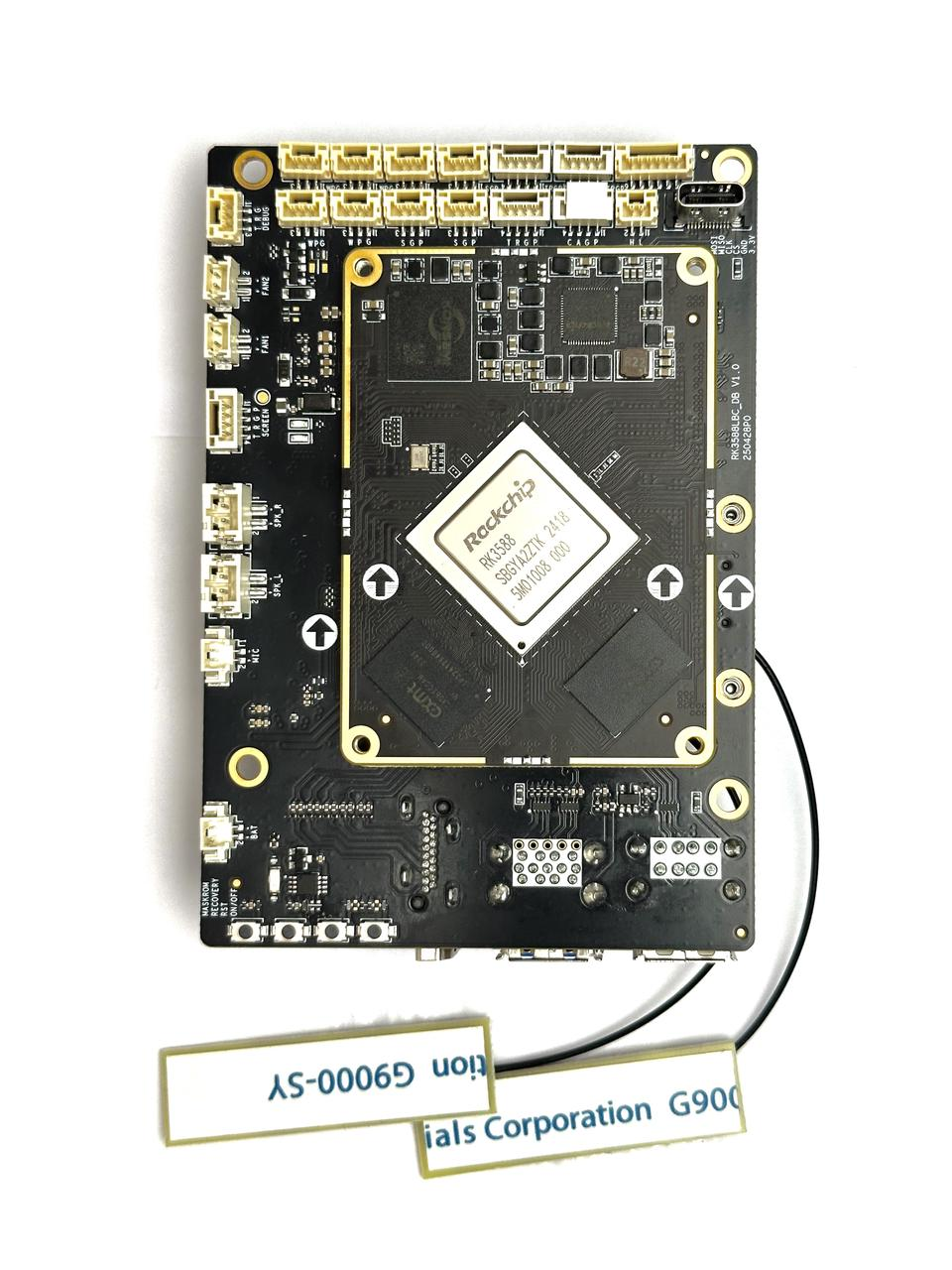
核心板搭载四核A76+四核A55的八核CPU处理器——RK3588,其拥有性能强大的GPU,内置6T算力的NPU, 另外核心板还板载大容量eMMC和DDR芯片,通过BTB引脚实现了芯片外设的最大化引出。
(2)机器人主控盒子-RK3588底板
拥有核心板分离设计,提供丰富的连接选项和扩展接口。如多个 USB 端口(USB 2.0 和 USB 3.0),HDMI 输出接口,TF 卡插槽,以及支持 4G 或 WiFi 的 Mini-PCIe 插口,配备 Type-C 接口、Debug 串口、音频输入输出端口等,支持多种外设连接和调试功能,使其成为开发者进行硬件设计和软件开发的理想选择。
(3)机器人主控盒子-7路CAN-功率板
7路CAN-功率板是专门设计用于高效能的电力和通信应用。它通过XT60(2+4)电源接口48V输入,并且提供2路Debug串口接口,方便调试和开发。板上包含7个XT30(2+2)接口用于电源输出等,支持12V电压输出对载板供电。此外,板上还集成了1个IMU模块和1个调试接口,确保多样化的功能扩展和稳定的供电系统。
• 接口一览图
• 各接口定义(引脚图、功能描述)
• 示例连接拓扑(接电机、供电、接电脑等)
• 安装方式或固定孔位图
|
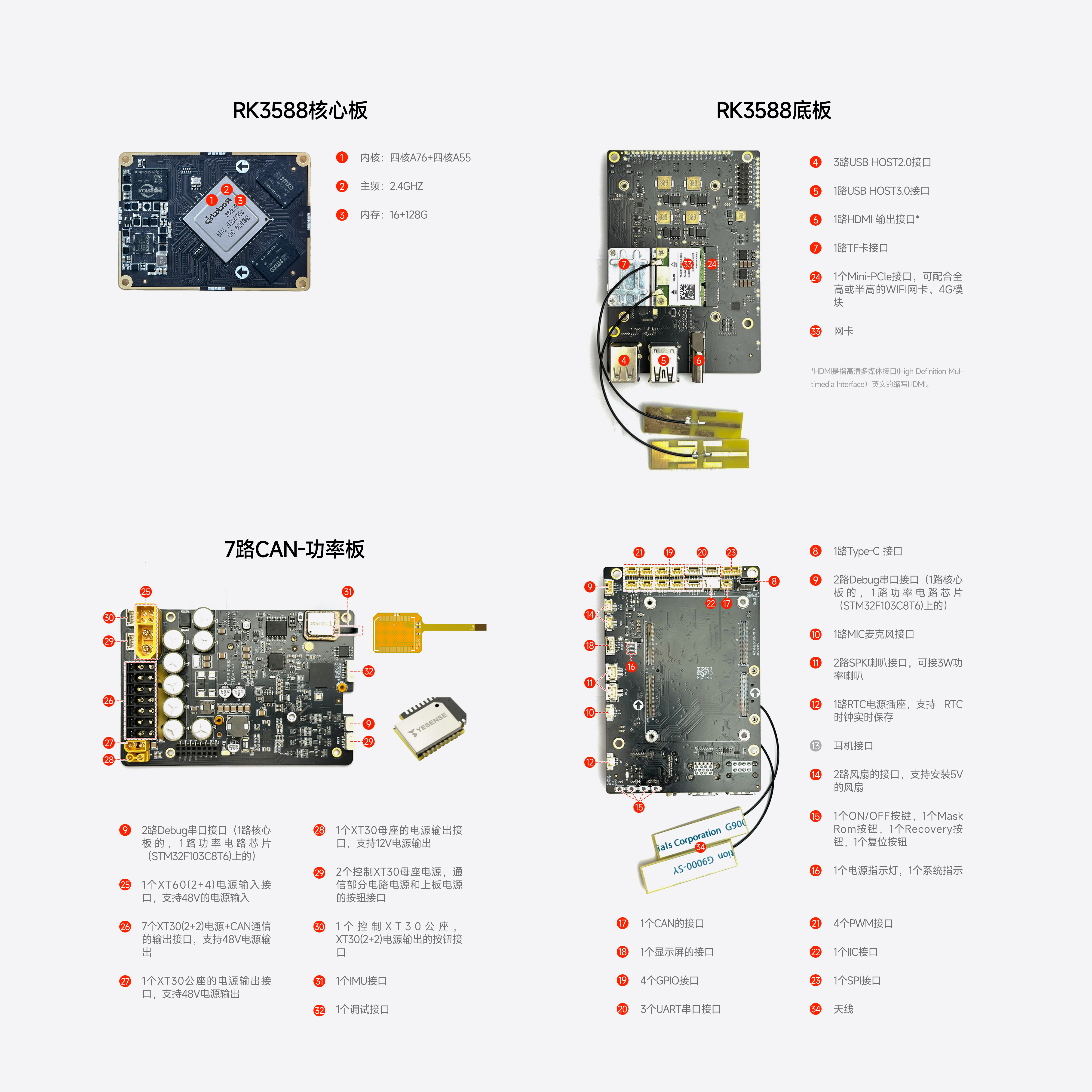
1. 内核:四核A76+四核A55 2. 主频:2.4GHZ 3. 内存:16+128G 4. 3路USB HOST2.0接口 5. 1路USB HOST3.0接口 6. 1路HDMI 输出接口 7. 1路TF卡接口 8. 1路Type-C 接口 9. 2路Debug串口接口(1路核心板的,1路功率电路芯片(STM32F103C8T6)上的) 10. 1路MIC麦克风接口
|
11. 2路SPK喇叭接口,可接3W功率喇叭 12. 1路RTC电源插座,支持 RTC 时钟实时保存 13. 耳机接口 14. 2路风扇的接口,支持安装5V的风扇 15. 1个ON/OFF按键,1个Mask Rom按钮,1个Recovery按钮,1个复位按钮 16. 1个电源指示灯,1个系统指示灯 17. 1个CAN的接口 18. 1个显示屏的接口 19. 4个GPIO接口 20. 3个UART串口接口
|
21. 4个PWM接口
22. 1个IIC接口 23. 1个SPI接口 24. 1个Mini-PCle接口,可配合全高或半高的WIFI网卡、4G模块 25. 1个XT60(2+4)电源输入接口,支持48V的电源输入 26. 7个XT30(2+2)电源+CAN通信的输出接口,支持48V电源输出 27. 1个XT30公座的电源输出接口,支持48V电源输出 28. 1个XT30母座的电源输出接口,支持12V电源输出 29. 2个控制XT30母座电源,通信部分电路电源和上板电源的按钮接口 30. 1个控制XT30公座,XT30(2+2)电源输出的按钮接口 31. 1个IMU接口 32. 1个调试接口 33. 网卡 34. 天线 |
• 2个控制按钮分别为大按钮(带线)、小按钮(带线)
• XT30(20cm-公头转母头)、XT30(20cm-母头转母头)
• 5根XT30(2+2)的线材
• 1根0数据线(用于烧录)
• 散热器(铝块&风扇)
• 推荐系统环境(如04)
推荐使用产品出厂自带Ubuntu系统(Ubuntu20.04系统),配好ROS环境(noetic)。
• 安装驱动/依赖
如使用官方SDK需要配置ROS环境(noetic),需安装串口通信驱动,指令如下
sudo apt-get install libserialport0 libserialport-dev
• 使用的开发环境
如 ROS1(noetic)、CAN调试工具、串口助手等










