首页
机器人
双足机器人Pi
模块化开源Pi+
人形机器人Hi
核心零部件
伺服关节模组
– 行星系列关节模组
– 超薄系列关节模组
– 中空关节模组
机械臂
控制器
电池
服务与支持
文档中心
下载中心
解决方案中心
条款与政策
售后处理
新闻动态
关于我们
联系我们
English
核心零部件
行星系列关节模组
超薄系列关节模组
中空关节模组
机械臂
控制器
电池
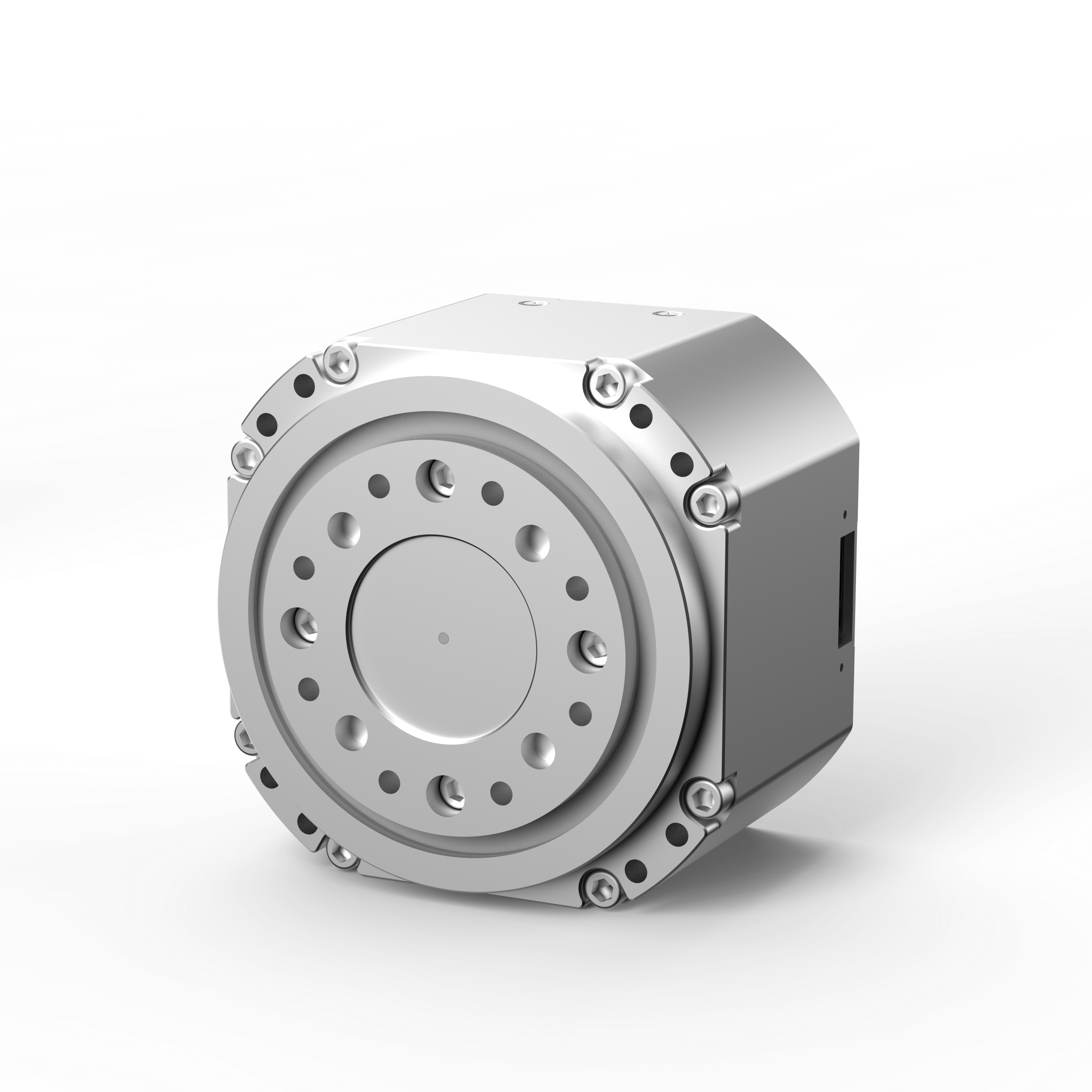
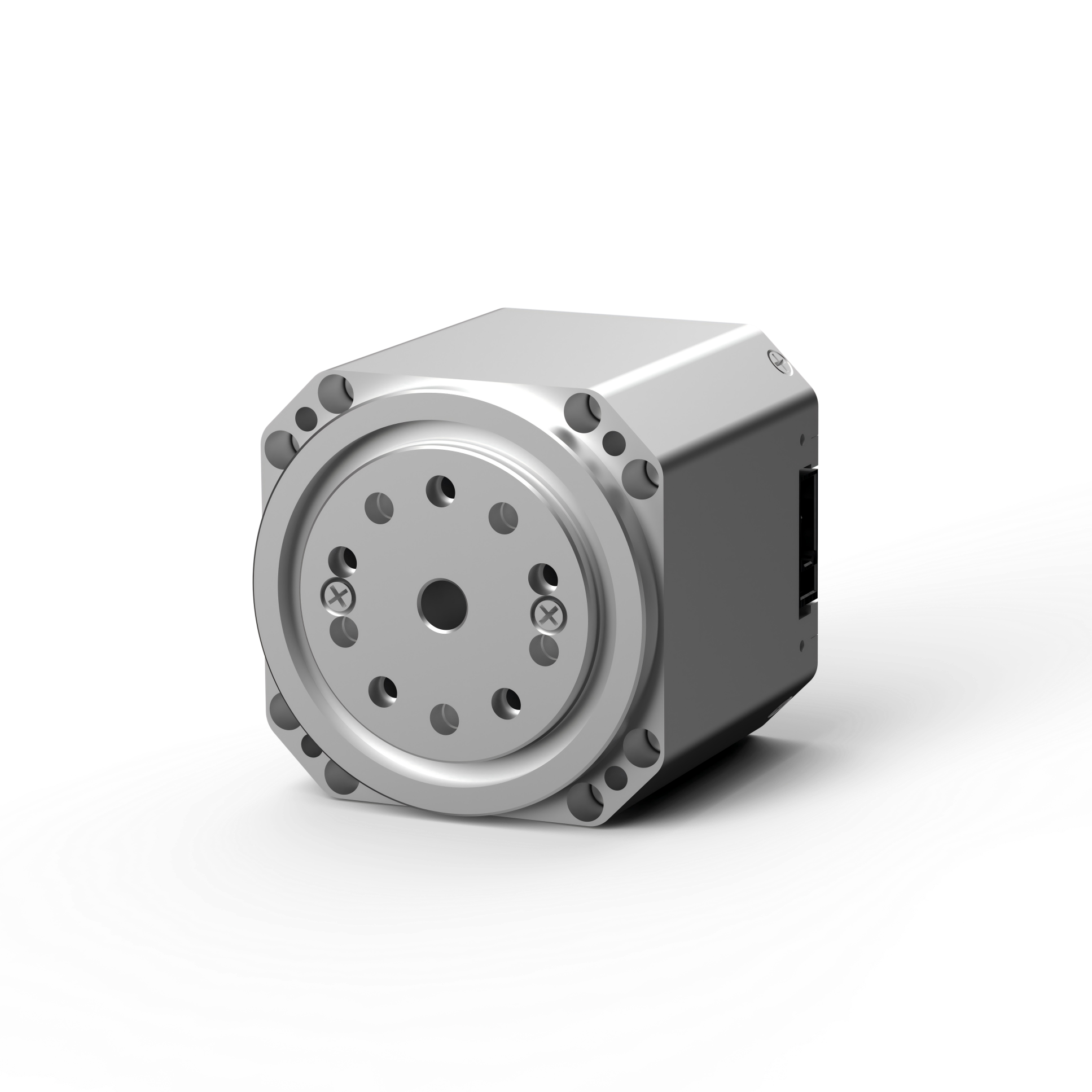
HTDW系列和HTPW系列行星关节模组主要由优化设计的行星齿轮减速机和自主设计的无刷直流电机组成。配备
低齿间隙转矩、转矩脉动和双绝对值编码器,支持电流或扭矩控制
。广泛应用于自动化设备、机器人技术和航空航天等领域,特别适用于空间受限且需要精确动力分配的场景。
超大扭矩
超小体积
高性价比
双编码器
HTPW-7507-02-DNE
电机长宽
电机高度
重量
减速比
额定扭矩
75mm
35mm
390g
7
4Nm
堵转扭矩
额定输出功率
额定转速
空载转速
通信方式
12Nm
92W
250rpm
270rpm
CAN、CANFD
购买咨询
了解详情
HTDW-4438-30-NE-JC
电机长宽
电机高度
重量
减速比
额定扭矩
44mm
44.9mm
237g
30
2Nm
堵转扭矩
额定输出功率
额定转速
空载转速
通信方式
10Nm
8.5W
40rpm
160rpm
CAN、CANFD
购买咨询
了解详情
HTDW-4438-30-NE
电机长宽
电机高度
重量
减速比
额定扭矩
44mm
43.4mm
237g
30
2Nm
堵转扭矩
额定功率
额定转速
空载转速
通信方式
10Nm
8.5W
40rpm
160rpm
CAN、CANFD、485
购买咨询
了解详情
HTDW-5022-02-DNE
长宽
高度
重量
减速比
扭矩常数
50mm
47.4mm
322g
20
0.54Nm/A
极对数
堵转扭矩
空载转速
额定扭矩
额定转速
14
13Nm
123rpm
3.5Nm
82rpm
购买咨询
了解详情
HTDW-5036-02-DNE
电机长宽
电机高度
重量
减速比
额定扭矩
50mm
47.4mm
323g
36
6Nm
堵转扭矩
额定输出功率
额定转速
空载转速
通信方式
21Nm
30W
50rpm
75rpm
CAN、CANFD
购买咨询
了解详情
HTDW-5036-02-CNE
长宽
高度47.4mm
重量
扭矩常数
极对数
50mm
345g
0.54Nm/A
14
减速比
堵转扭矩
空载转速
额定扭矩
额定转速
36
21Nm
75rpm
6Nm
50rpm
购买咨询
了解详情
HTDW-6036-02-DNE
电机长宽
电机高度
重量
减速比
额定扭矩
60mm
56mm
565g
36
10Nm
购买咨询
了解详情
HTDW-6036-02-CNE
长宽
高度
重量
极对数
减速比
60mm
56mm
570g
14mm
36
空载转速
堵转扭矩
额定转速
额定输出功率
通信方式
60rpm
36Nm
50rpm
52W
FDCAN、CAN
购买咨询
了解详情
HTDW-7535-02-CNE
电机长宽
电机高度
重量
减速比
额定扭矩
75mm
56mm
850g
35
18Nm
堵转扭矩
额定转速
空载转速
通信方式
额定输出功率
60Nm
50rpm
60rpm
FDCAN、CAN
94W
购买咨询
了解详情
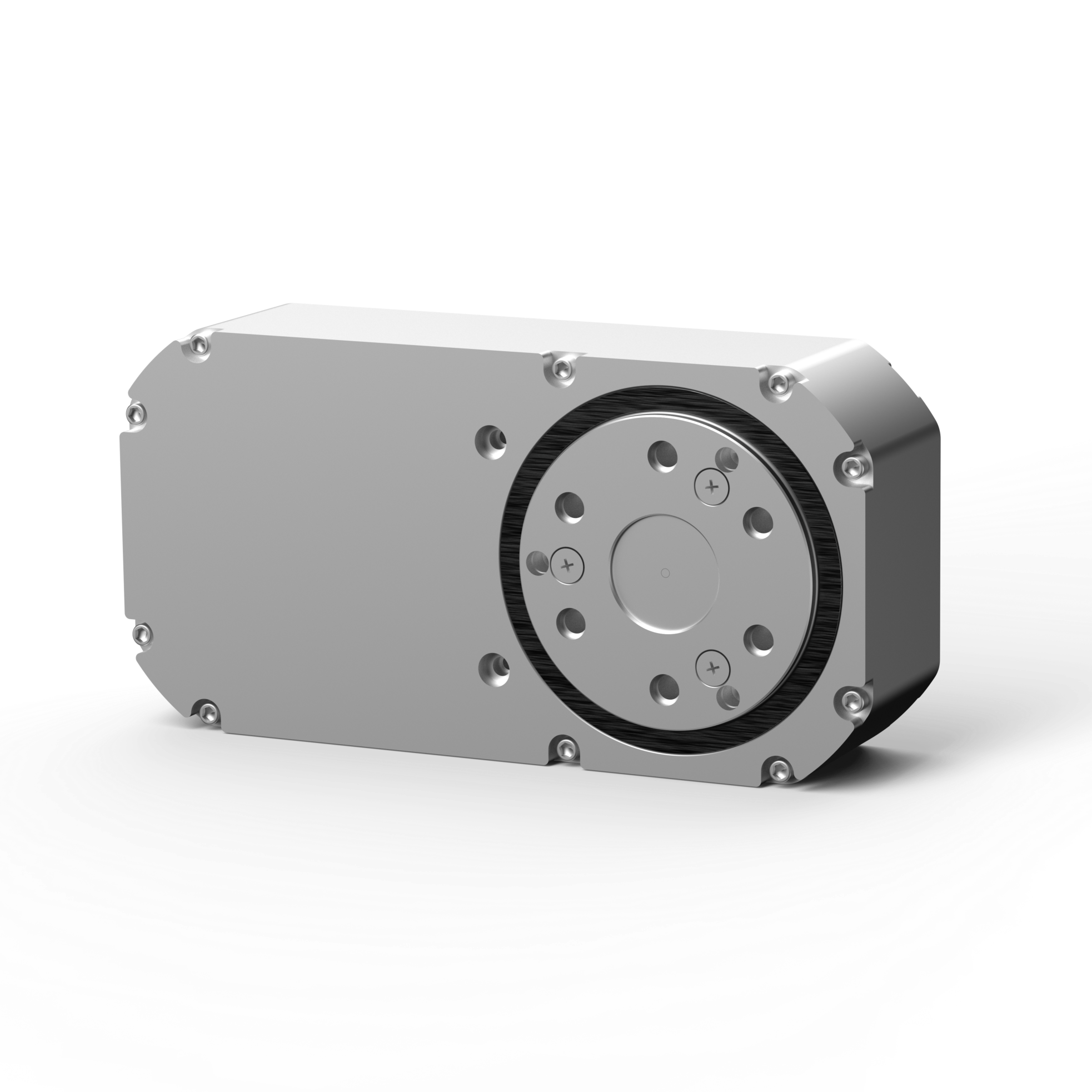
HTPU系列关节模组主要是由并排齿轮、行星齿轮组构成的减速机和自主设计的无刷直u流电机组成。配备低齿间隙转矩,转矩脉动和双绝对值编码器,支持电流或扭矩控制。广泛应用于外骨骼设计/穿戴设备/小型人形机器人/机械臂等领域,其独特扁平化设计可为各类空间受限场景传动提供更多选择。
扁平化设计
超大扭矩
超高精度
双编码器
HTPU-7033-04-CNE
电机长度
电机宽度
电机高度
电机重量
额定扭矩
140.5mm
71.5mm
36.9mm
808g
20Nm
购买咨询
了解详情
HTPU-6035-04-CNE
长度
宽度
高度
重量
减速比
115mm
61.9mm
37mm
558g
35
堵转扭矩
空载转速
额定扭矩
额定转速
额定输出功率
36Nm
60rpm
10Nm
50rpm
52W
购买咨询
了解详情
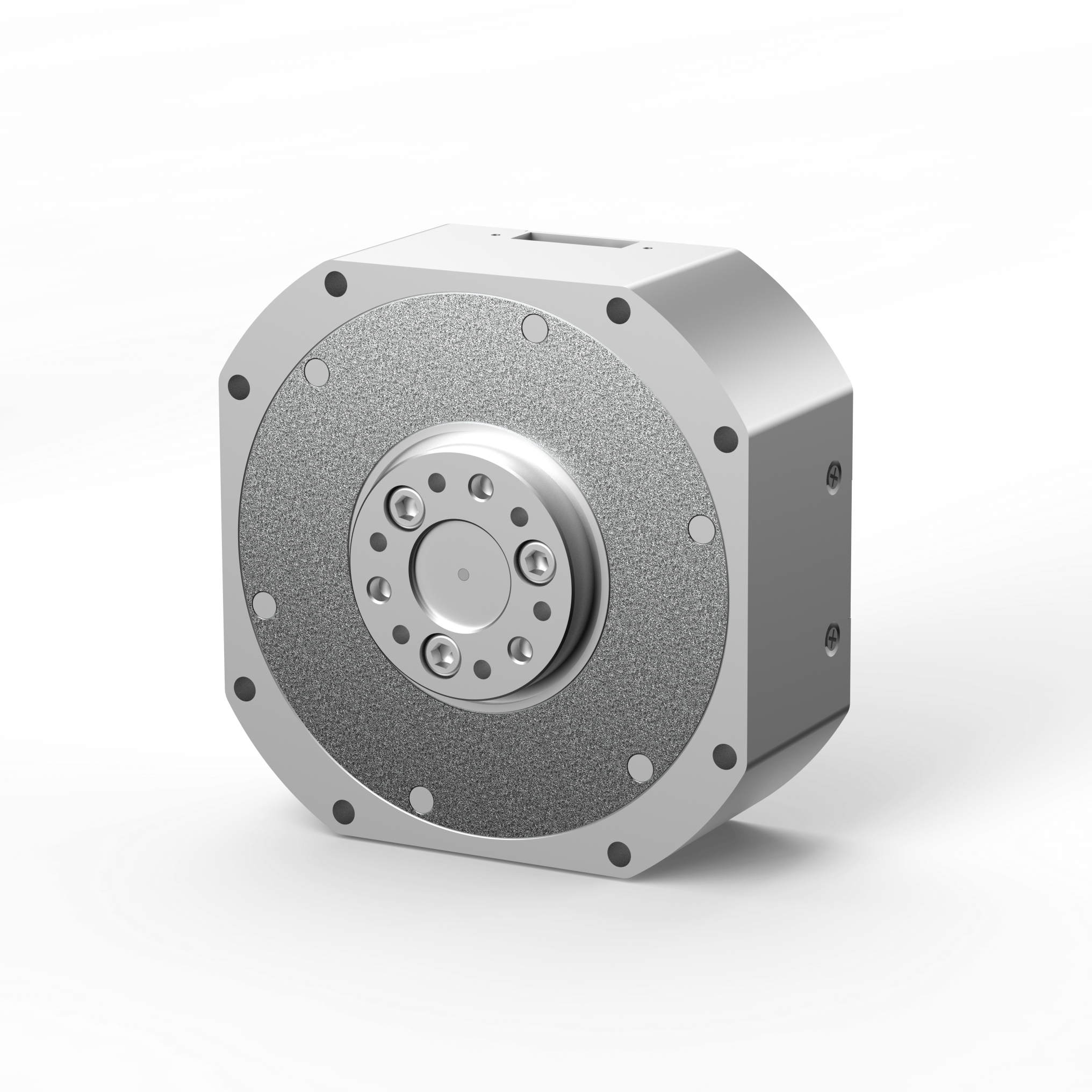
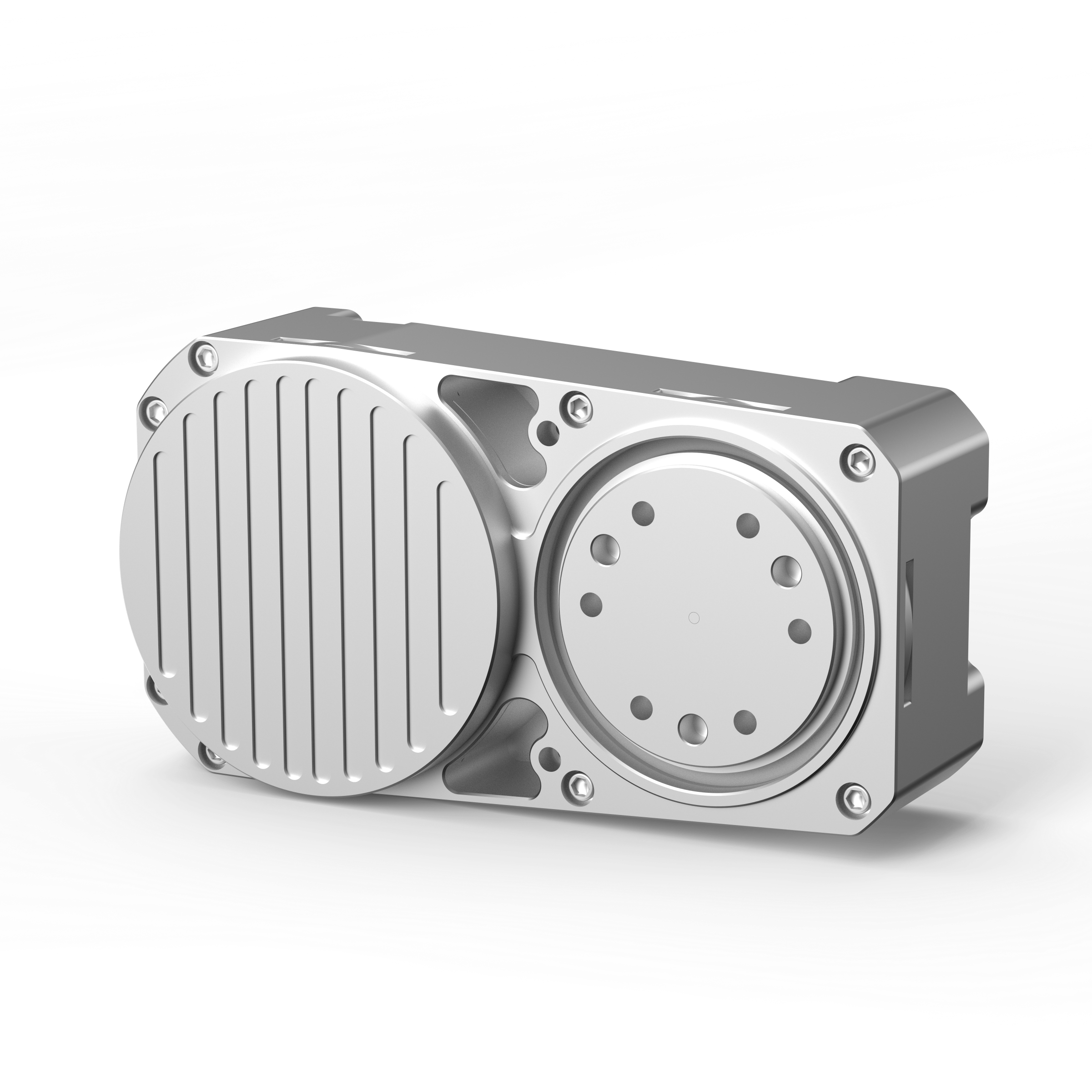
HTCP系列和HTCW系列摆线中空关节模组主要由优化设计的摆线针轮减速机和自主设计的无刷直流电机组成。配备低齿间隙转矩、转矩脉动和双绝对值编码器,支持电流或扭矩控制。广泛应用于自动化设备、机器人技术和航空航天等领域,中空设计方便布线,特别适用于空间受限、且需要精确动力分配的场景。
超大扭矩
超小体积
高性价比
双编码器
HTCP-5031-06-CYC
电机长宽
电机高度
重量
减速比
额定扭矩
50mm
53.4mm
385g
31
4Nm
堵转扭矩
额定输出功率
额定转速
空载转速
通信方式
16Nm
21W
50rpm
103rpm
CAN、CANFD
购买咨询
了解详情
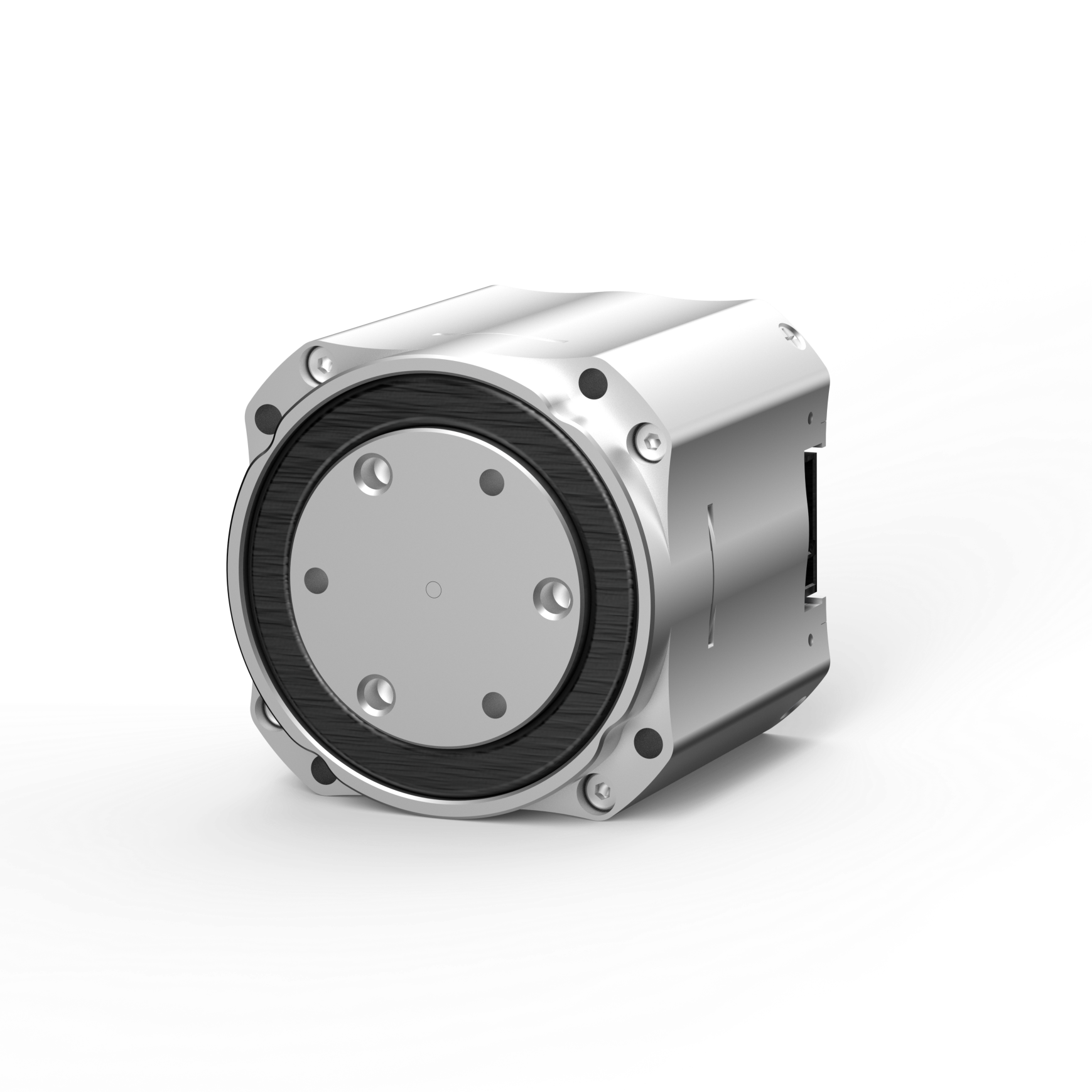
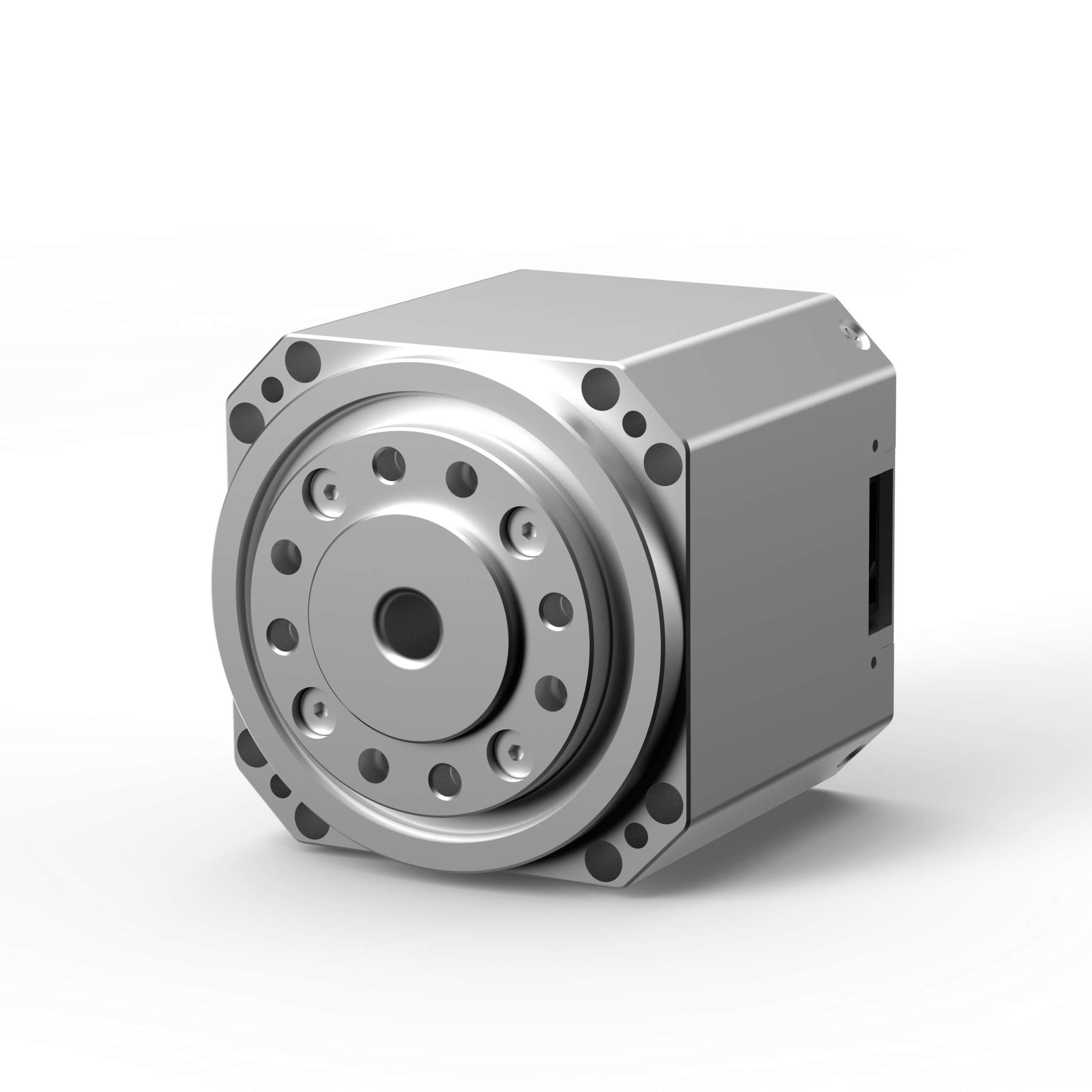
HTCP-4531-06-CYC
电机长宽
电机高度
重量
减速比
额定扭矩
44mm
44.9mm
237g
31
2Nm
堵转扭矩
额定输出功率
额定转速
空载转速
通信方式
10Nm
8.5W
40rpm
160rpm
CAN、CANFD
购买咨询
了解详情
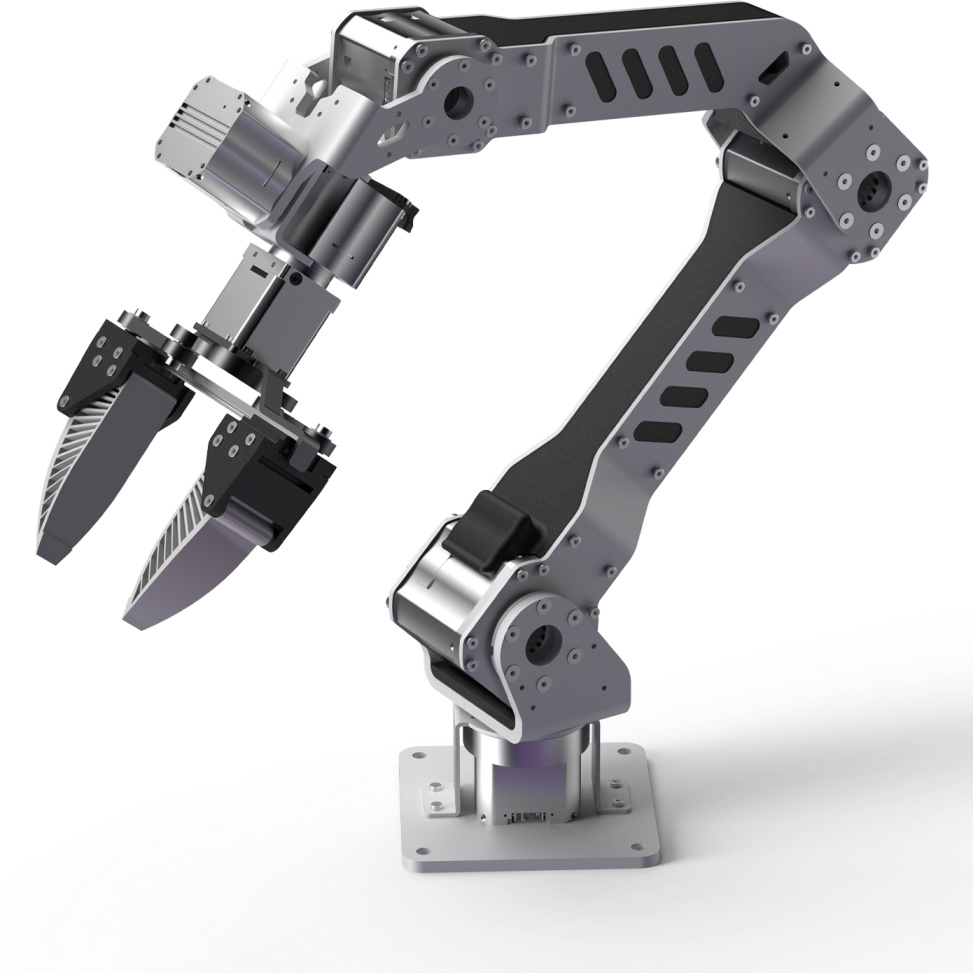
强劲性能
完整生态
开箱即用
Panthera-HT 6轴机械臂
站立尺寸
折叠尺寸
重量
工作电压
最大负载
860mm
460mm
4.35kg
24V
3.5kg
购买咨询
了解详情
小身形 模块化
丰富拓展接口
支持7路CAN
7路 CAN 主控盒子控制器
尺寸
处理器型号
输入电压范围
输出电压范围
持续电流(CAN1/2)
长140mm、宽82mm、高40mm
RK3588S
24V-50V
24V-50V
30A
持续电流(CAN3/4)
持续电流(CAN5/6/7)
FDCAN波特率
CAN/FDCAN通道数量
功能拓展接口
20A
20A
5Mbps
7路
GH_1.25_3p/4p/5p
购买咨询
了解详情
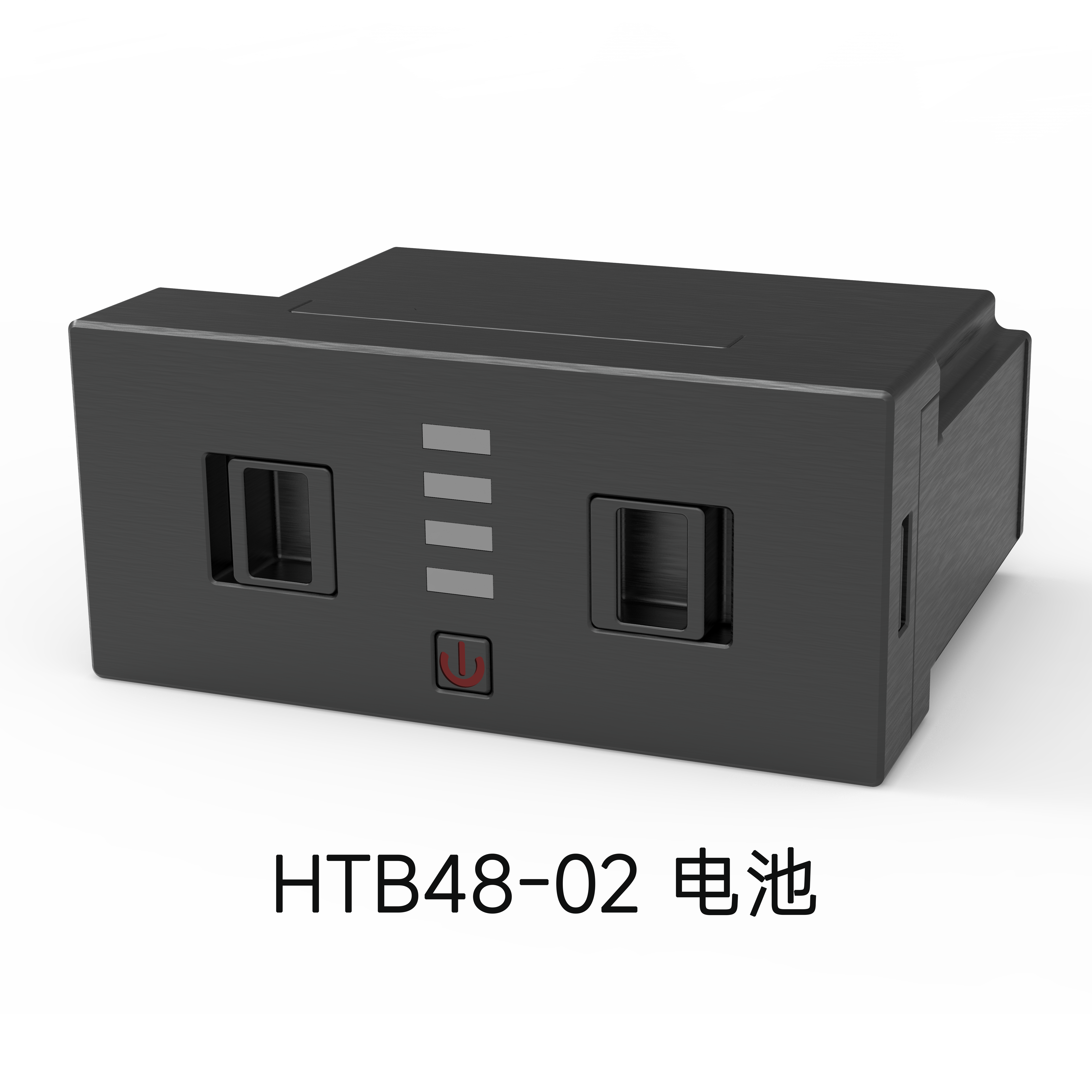
长效续航>2H
稳定不发热
BMS充放电保护
支持PD快充
HTB48-02 电池
型号
电池重量
容量
标称电压
最大许可输入电压
HTB48-02
1096g
4500mAh
43.2V
50.4V
最大许可输入电流
额定电流
最大放电电流
电池类型
能量
6A
15A
80A(可持续5s)
Li-ion
194.4Wh
购买咨询
了解详情
HTB24-03 电池
型号
重量
容量
标称电压
最大许可输入电压
HTB24-03
560g
4500mAh
21.6V
25.2V
最大许可输入电流
额定电流
最大放电电流
电池类型
能量
6A
15A
60A(5s)
Li-ion
97.2Wh
购买咨询
了解详情
扫码了解更多详情
×
获取详细资料
*
姓名
*
电话
*
公司名称及岗位职称
*
产品
不限产品
人形机器人 Mini Hi
人形机器人 Mini Pi plus
双足机器人 Mini Pi
行星系列关节模组
超薄系列关节模组
中空关节模组
机械臂
控制器
电池
*
型号
不限型号
Panthera-HT 6轴机械臂
HTCP-5031-06-CYC
HTCP-4531-06-CYC
HTPW-7507-02-DNE
HTDW-4438-30-NE-JC
7路 CAN 主控盒子控制器
HTB48-02 电池
HTB24-03 电池
低成本模块化开源Mini Pi plus
HTPU-7033-04-CNE
HTPU-6035-04-CNE
人形机器人Mini Hi
高性能双足机器人Pi
HTDW-4438-30-NE
HTDW-5022-02-DNE
HTDW-5036-02-DNE
HTDW-5036-02-CNE
HTDW-6036-02-DNE
HTDW-6036-02-CNE
HTDW-7535-02-CNE
*
需求
提交
使用微信扫一扫添加“客服”
表单提交成功!
表单提交失败!

-%E6%A0%87%E6%B3%A8%E7%89%88.png)










